联系我们
联系我们


2. p100为robtarget类型数据,即记录的是xyz等数据。
3. 该数据若非示教,而是通过计算或者外部相机拍照发送得到,有时就会发生机器人不可达。
4. 此时只有机器人运行到该行代码时,机器人报警并停机。
5. 是否可以提早对p100进行运算,检测机器人是否可达?
6. 可以使用函数CalcJoint函数,该函数返回p100在tool0下对应的各轴数据
jpos10:=CalcJointT(p100,tool0ErrorNumber:=myerrnum);
7. 增加ErrorNumber可选参数,此时若计算出的位置机器人不可达,则会得到报警代码ERR_ROBLIMIT(单轴超限)或者ERR_OUTSIDE_REACH(机器人不可达),后续对该错误代码处理即可。此时机器人不会停机。
8. 代码如下:
jpos10:=CalcJointT(Home20,tool0ErrorNumber:=myerrnum);
IF myerrnum=ERR_OUTSIDE_REACH THEN
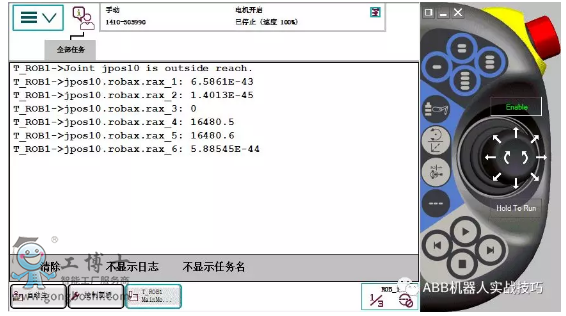
TPWrite "Joint jpos10 is outside reach.";
TPWrite "jpos10.robax.rax_1: "+ValToStr(jpos10.robax.rax_1);
TPWrite "jpos10.robax.rax_2: "+ValToStr(jpos10.robax.rax_2);
TPWrite "jpos10.robax.rax_3: "+ValToStr(jpos10.robax.rax_3);
TPWrite "jpos10.robax.rax_4: "+ValToStr(jpos10.robax.rax_4);
TPWrite "jpos10.robax.rax_5: "+ValToStr(jpos10.robax.rax_5);
TPWrite "jpos10.robax.rax_6: "+ValToStr(jpos10.robax.rax_6);
ENDIF
9. 假设此时Home20位置的x为10000,机器人完全不可达,则输出结果如下: