

 联系我们
联系我们

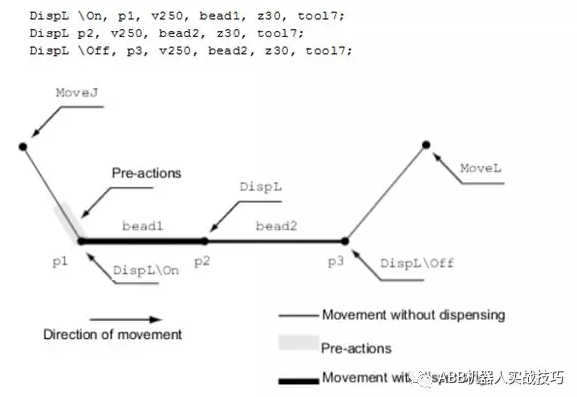
1) 针对涂胶,ABB机器人有专门的dispense软件,也有对应的指令
2) 主要指令有DispL和DispC,其中DispL为走直线,DispC为走圆弧
3) 上述为
2) P1到p2之间使用bead1涂胶参数
3) P2到p3使用bead2涂胶参数
4) 到p3后关闭涂胶
4) Bead1参数如下
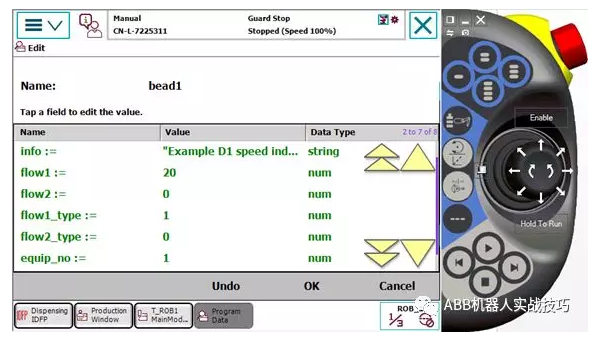
Flow1为流量,flow1_type为流量形式,其中1为 与速度无关(即机器人速度不论快慢,出胶量不变),2为与速度有关,即机器人出胶量会随着机器人运动速度快加大,速度慢减小
5) 对应还有一个参数为equipdata

其中,ref_speed即为机器人参考速度。
如果bead数据里的flow1_type选择2,和速度有关。那么如果ref_speed为500,机器人速度实际也为500,出胶量就为设置的20.如果机器人实际速度为250(ref_speed的50%),出胶量就为实际的50%,即10. 了解更多:ABB机器人
